viernes, 9 de noviembre de 2007
Display 7 segmentos
En un display de 7 segmentos se representan los dígitos 0 a 9 iluminando los segmentos adecuados. También suelen contener el punto o la coma decimal.
viernes, 28 de septiembre de 2007
Resistencias en Serie y en Paralelo
Esta actividad nos sirvio para aprender a leer las resistencias en serie y en paralelo con la ayuda de las formulas.
Ley de Ohm
La ley de Ohm, es una propiedad específica de ciertos materiales. La relación es un enunciado de la ley de Ohm. Un conductor cumple con la ley de Ohm sólo si su curva V-I es lineal; esto es si R es independiente de V y de I.
V= R*I
En donde, empleando unidades del Sistema internacional de unidades
I = Intensidad en amperios
V = Diferencia de potencial en voltios
R = Resistencia en ohmios (Ω)
En el caso de las resistencias en serie usamos
 Para las resistencias en paralelo utilizamos
Para las resistencias en paralelo utilizamos
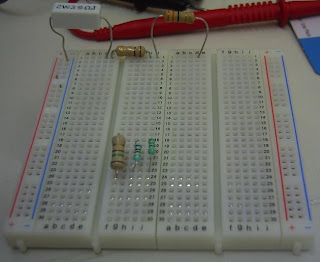
Resistencia y Protoboard
Resistencia
Se denomina resistencia o resistor (en lenguaje técnico) al Componente electrónico diseñado para introducir una Resistencia eléctrica determinada entre dos puntos de un Circuito eléctrico
En otros casos, como en las planchas, calentadores, etc., las resistencias se emplean para producir Calor aprovechando el Efecto Joule
En otros casos, como en las planchas, calentadores, etc., las resistencias se emplean para producir Calor aprovechando el Efecto Joule

Protoboard
El dispositivo más básico para armar circuitos sencillo es el protoboard.Esta hecha para poder comunicar dos elementos conductores (alambres, patas de dispositivos, fuentes de voltaje) sin necesidad de soldarlos, sino simplemente al introducirlos en dos o más agujeros que por debajo estén interconectados. No todos los agujeros de la protoboard están comunicados entre sí. Este es un diagrama simple de su funcionamiento, las franjas grises muestran lo que serían lineas de conducción separadas: tiras metálicas dobladas para agarrar los alambres.

Robosapiens
Esta actividad fue un documental sobre robots
Robots con emociones. Los robots que hablan, juegan al fútbol, el crimen de lucha, y ayudan a astronautas en el espacio.
Los robots que pronto compartirán nuestras casas. ¿Serán ellos nuestros esclavos o nos haremos los suyos?
Este programa entra en los centros de investigación más avanzados para mostrarnos el futuro de la robótica. En Japón, hay un competencia feroz para producir robots humanoides para el trabajo y el juego.
En EE UU, la investigación se concentra en máquinas robóticas para los militares y la policía.
Pero el mayor desafío técnico debe producir los robots que pueden actuar recíprocamente emocionalmente con la gente, hablan y responden a nuestras emociones. Sus diseñadores creen que si ellos pueden hacer esto, los robots debe tener sus propias emociones.
Robots con emociones. Los robots que hablan, juegan al fútbol, el crimen de lucha, y ayudan a astronautas en el espacio.
Los robots que pronto compartirán nuestras casas. ¿Serán ellos nuestros esclavos o nos haremos los suyos?
Este programa entra en los centros de investigación más avanzados para mostrarnos el futuro de la robótica. En Japón, hay un competencia feroz para producir robots humanoides para el trabajo y el juego.
En EE UU, la investigación se concentra en máquinas robóticas para los militares y la policía.
Pero el mayor desafío técnico debe producir los robots que pueden actuar recíprocamente emocionalmente con la gente, hablan y responden a nuestras emociones. Sus diseñadores creen que si ellos pueden hacer esto, los robots debe tener sus propias emociones.

Practica Cohete
Haciendo uso de la clase anterior con respecto al diseño había que crear un cohete en menos de 1:30 horas, el cohete debía despejar y volar el que lo hiciera volar más alto seria el ganador.
Este fue nuestro resultado
Este fue nuestro resultado
Cohete
Pues empezamos teniendo en mente la idea clásica de un cohete con mentas y coca de dieta pero sinceramente queríamos algo mas grande y mejor pues sabíamos que seria poca la altura de el cohete, así que pensamos en una propulsión con aire pero también seria complicado lograr una presión para levantar el cohete.
Después de varias ideas llegamos a la conclusión de que queríamos una explosión y decidimos hacer en base a eso nuestro cohete con la dichosa "Bomba de Salfuman" de propulsión
Materiales
- Tubo de PVC
- Aluminio
- Ácido Clorhídrico
- 2 Botellas
Procedimiento
Se hacen bolitas de aluminio para llenar una sexta parte de una de las botellas y se colocan dentro, luego se toma el tubo de PVC en una base solida y se acomodan algunas piedras para que no se mueva se toma la otra botella y le damos forma aerodinámica con cualquier material ligero, se le pone el ácido a la botella con las bolitas y enseguida se pone en la base del PVC (no debe agitarse por que se hinchara la botella y no podrá caber en el tubo) una ves que este la botella de la reacción en el tubo de PVC ponerlo en la base de piedras antes hecha, rápidamente coloque el cohete dentro del tubo y "ALEJESE"
Demostración:
Proyectos Mecatrónicos
Todo proyecto de ingeniería requiere un diseño
Proyectos Mecatrónicos en el área de investigación
- ANÁLISIS Y CONTROL DE SISTEMAS NO LINEALES EN TIEMPO DISCRETO
Los sistemas no lineales en tiempo discreto aparecen en diferentes ramas de la Ingeniería y las Matemáticas aplicadas de diferentes maneras. Por ejemplo, ciertos procesos económicos y biológicos se modelan, de manera natural, por ecuaciones de diferencias. Por otra parte, el desarrollo que los sistemas de cómputo han experimentado en la última década ha hecho posible controlar sofisticados procesos tecnológicos mediante una computadora digital. Esta situación ha favorecido el diseño de algoritmos de control a partir de un modelo discretizado, aún cuando el proceso original opere en tiempo continuo.
Este trabajo involucra las disciplinas de Sistemas electromecánicos para procesos químicos, programación.
- TELEOPERACIÓN BILATERAL ÁPTICA VIA INTERNET.
Este proyecto tiene dos objetivos: el primero es realizar investigación básica en teleoperadores para un sistema robótico en configuración maestro-esclavo. El sistema está acoplado bilateralmente por la posición, velocidad y fuerzas de contacto, y el problema de control es lograr que el esclavo realice la tarea comandada remotamente con retardo por el operador desde la estación maestra. El segundo objetivo es la validación experimental del sistema en un prototipo experimental que se diseñará y construirá en el Laboratorio de Robótica y Manufactura de la Sección. Este sistema contará con comunicación visual y auditiva. El medio de comunicación es Internet I, aunque se considerara la nueva conexión del laboratorio de Internet II.
Este trabajo involucra las disciplinas de programación, electronica de control, robotica y sistemas computacionales.
- TELESCOPIO ESPACIAL HUBBLE
El Telescopio espacial Hubble (HST por sus siglas inglesas) es un telescopio robótico localizado en los bordes exteriores de la atmósfera, en órbita circular alrededor de la Tierra a 593 km sobre el nivel del mar, con un periodo orbital entre 96 y 97 min. Denominado de esa forma en honor de Edwin Hubble, fue puesto en órbita el 24 de abril de 1990 como un proyecto conjunto de la NASA y de la ESA inaugurando el programa de Grandes Observatorios. El telescopio puede obtener imágenes con una resolución óptica mayor de 0,1 segundos de arco.
La ventaja de disponer de un telescopio más allá de la atmósfera radica, principalmente, en que de esta manera se pueden eliminar los efectos de la turbulencia atmosférica, siendo posible alcanzar el límite de difracción como resolución óptica del instrumento. Además, la atmósfera absorbe fuertemente la radiación electromagnética en ciertas longitudes de onda, especialmente en el infrarrojo, disminuyendo la calidad de las imágenes e imposibilitando la adquisición de espectros en ciertas bandas caracterizadas por la absorción de la atmósfera terrestre. Los telescopios terrestres se ven también afectados por factores meteorológicos (presencia de nubes) y la contaminación lumínica ocasionada por los grandes asentamientos urbanos, lo que reduce las posibilidades de ubicación de telescopios terrestres.
El Telescopio Espacial Hubble ha sido uno de los proyectos que, sin duda, más han contribuido al descubrimiento espacial y desarrollo tecnológico de toda la Historia de la Humanidad. Gran parte del conocimiento científico del que los estudiosos disponen del espacio interestelar se debe al Telescopio Hubble.
Proyectos Mecatrónicos en el área de Aplicación
- CONTROL DE AUTOMÓVILES PARA ESTACIONAMIENTO
El objetivo de este trabajo fue desarrollar un sistema automatizado que lleve el control y detección de los automóviles, que ingresan a un estacionamiento en relación con los lugares disponibles. Es decir, el sistema deberá llevar la cuenta de los automóviles que estén dentro del estacionamiento en todo momento, y así poder decidir si abre o no abre la entrada y así evitar problemas dentro del mismo. Este trabajo involucra las disciplinas de mecánica, electrónica, programación, control de sistemas digitales y sistemas de control
Este proyecto tiene versatilidad y es considerado altamente comercial. Las ventajas que presentan son las siguientes: ocupa poco espacio, puede ser operado por cualquier persona y es relativamente económico. Otra importante ventaja es que puede agregarse varias etapas como trabajo a futuro
- BARRENADO DE PLACAS MEDIANTE TRATAMIENTO DE IMÁGENES
El objetivo de este proyecto es la implementación de códigos “G” y maquinado de barrenos sobre piezas por medio del tratamiento de imágenes procesadas sobre un entorno amigable de programación. Al igual que los proyectos de Mecatrónica, este trabajo involucra las disciplinas de mecánica, electrónica y programación.
Las ventajas del proyecto son las siguientes: didáctico, económico y es un tema suficientemente consistente para obtener el grado de la especialidad. - DISEÑO DE CONTROL DE LUMINOSIDAD EN UN EDIFICIO
El objetivo del trabajo fue disminuir el consumo de energía eléctrica en los edificios escolares, controlando el encendido y apagado de las luminarias en un edificio, mediante
Censores de presencia y un controlador lógico programable (PLC) para fin de obtener una mejor comodidad y una reducción en el consumo de energía, logrando un mejor aprovechamiento de los recursos.
Este trabajo involucra las disciplinas de electricidad, programación, sistemas de control, sistemas mini computarizados y accionadotes electromecánicos.
Diseño de Ingenieria
Diseño de Ingeniería
Cuando la aplicación tecnológica es compleja y el resultado es muy abstracto entramos a el diseño de ingeniería, esto quiere decir que la ingeniería va de la mano con el diseño, debido a la
aplicación de conceptos y habilidades que se van conjuntadas.
Metodologia del diseño
- Identificar la necesidad
- Determinar el mercado
- Enfoque determinado de "que" a diseñar
- Enlistar los requerimentos que contenga (Todas las necesidades que requiere el diseño
- Sacar la conclusión del diseño (diseño definitivo)
- Alternativas generando las ideas con bosquejos
- Evaluar las alternativas comprobando el listado de requerimentos tecnológicos
- Evaluar una síntesis o diseño final
- Conocer el resultado final mediante una presentación (prototipo, maqueta)
- Produccion
Procedimientos Generales del diseño
- Formulacion de problema
- Análisis del problema
- Búsqueda de soluciones
- Decisión
- Especificación
jueves, 27 de septiembre de 2007
Perfil de un Ingeniero en Mecatronica
Origen de la palabra ingeniero
- Ingenio
- Del ingles engineer (egine = maquina) es decir "hombre maquina"
- Del latin ingenium osea engendrar
¿Que debe hacer un ingeniero en mecatrónica?
- Inventar
- Crear
- Diseñar
- Comprender
- Desarrollar
- Construir
- Controlar
- Entender
- Analizar
- Imaginar
- Planear
¿Qué debe ser un ingeniero en mecatrónica?
- Emprendedor
- Preciso
- Inteligente
- Creativo
- Líder
- Práctico
- Profesional
- Ordenado
- Sociable
Áreas en donde puede trabajar el ingeniero
- Industria
- Comunicaciones
- Biológicas
- Construcción
- Zootecnias
- Manufactura
- Educación
- Investigación
- Medicina
- Arquitectura
- Computación
- Empresarial

Suscribirse a:
Entradas (Atom)